Research Areas
The group is interested in a wide range of research areas throughout visual computing. Details can be found on the projects page. PhD opportunities can be found here.
Information and Scientific Visualization
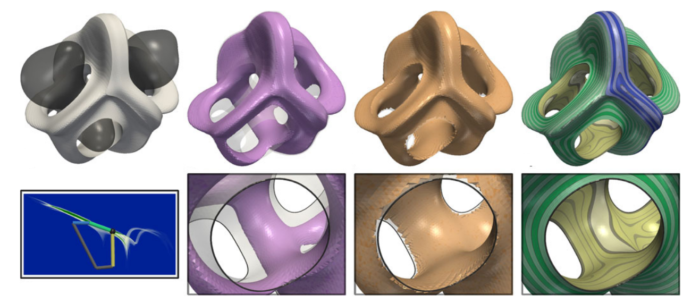
Scientific visualization (scivis), deals largely with numeric data, for example from climate simulation, geophysical surveys or medical scanners, whereas information visualization (infovis) works with discrete/symbolic data, for example relational databases, biological networks, or web logs. Our visualization research offers three main contributions:
- computational topology and other mathematical tools supporting analysis and abstraction,
- graphical interfaces, including large scale displays, for working with and navigating through data,
- systems and software for exploration and analysis of large datasets.

Hamish Carr
Professor

Roy Ruddle
Professor
Real-Time Rendering - Data Structures and Algorithms

Computer Graphics, and specifically real-time rendering, increasingly deals with large numbers of things. These range from very large data sets to represent large virtual worlds to large numbers of dynamic objects (such as light sources). To process and render large data sets, we rely on specialized methods. Large data sets are processed; hierarchical methods let us deal with large numbers of objects. Both of these rely on highly optimized and purpose-made data structures and algorithms that map well to hardware, such as GPUs.
Our research focuses on development of efficient data structures and algorithms, with a focus on the massively parallel nature of GPUs.

Markus Billeter
Lecturer
Computer Graphics for XR

When building Virtual and Augmented reality applications, computer graphics techniques are key to creating these worlds, and rendering them in an efficient way. Taking advantage of the human visual system, we are able to design specialized algorithms for faster rendering with a similar level of perceptual quality.
Our research also looks into 3D reconstruction and tracking; aspects which are key to bringing real world data into virtual experiences.
